Trong thế giới công nghệ ngày nay, sự phát triển của robot không chỉ dừng lại ở việc thực hiện các nhiệm vụ lặp đi lặp lại mà còn tiến xa hơn vào việc tái tạo các hành vi phức tạp của sinh vật sống. Một trong những lĩnh vực thú vị nhất trong nghiên cứu robot hiện đại là việc xây dựng các robot mô phỏng chuyển động của chim. Những robot này không chỉ giúp chúng ta hiểu rõ hơn về cách thức bay lượn của các loài chim mà còn mở ra nhiều ứng dụng tiềm năng trong ngành công nghiệp, môi trường và nghiên cứu khoa học. Trong bài viết này, chúng ta sẽ khám phá sâu hơn về robot mô phỏng chuyển động của chim từ khái niệm cơ bản cho đến các ứng dụng và thách thức trong việc phát triển chúng.
1. Khái niệm và lịch sử của robot mô phỏng chuyển động của chim
1.1. Định nghĩa robot mô phỏng chuyển động của chim
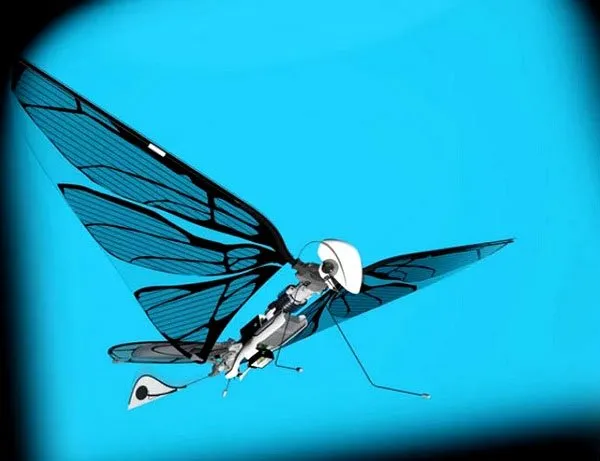
Robot mô phỏng chuyển động của chim là những thiết bị tự động được thiết kế để bắt chước hành vi bay lượn của các loài chim. Chúng có khả năng di chuyển trong không gian ba chiều, thay đổi độ cao, tốc độ và hướng di chuyển giống như một chú chim thật. Những robot này thường được trang bị các cảm biến và hệ thống điều khiển phức tạp để có thể phản ứng với môi trường xung quanh.
1.2. Lịch sử phát triển robot bay
Lịch sử của robot bay không chỉ bắt đầu từ những năm gần đây mà đã có từ hàng thế kỷ trước. Những mẫu máy bay đầu tiên được chế tạo dựa trên nguyên lý bay lượn của chim. Tuy nhiên, chỉ đến khi công nghệ điện tử phát triển mạnh mẽ, con người mới có khả năng tạo ra những robot có khả năng mô phỏng chuyển động của chim một cách chính xác và linh hoạt hơn.
1.3. Sự đóng góp của các nhà khoa học và kỹ sư
Nhiều nhà khoa học và kỹ sư nổi tiếng đã có những đóng góp quan trọng trong lĩnh vực này. Họ không chỉ nghiên cứu về cấu trúc và chức năng của các loài chim mà còn áp dụng kiến thức đó vào thiết kế robot. Việc áp dụng các nguyên lý sinh học vào công nghệ đã mở ra một hướng đi mới cho nghiên cứu robot mô phỏng chuyển động của chim.
2. Cấu trúc và nguyên lý hoạt động của robot mô phỏng chuyển động của chim
2.1. Các bộ phận chính của robot
Robot mô phỏng chuyển động của chim thường bao gồm các bộ phận chính như khung thân, cánh, hệ thống động cơ và cảm biến. Mỗi bộ phận đều có vai trò quan trọng trong việc tạo ra chuyển động tự nhiên và linh hoạt cho robot.
2.1.1. Khung thân và cánh
Khung thân của robot thường được làm bằng vật liệu nhẹ nhưng chắc chắn để giảm thiểu trọng lượng tổng thể, giúp robot dễ dàng bay lên. Cánh là phần quan trọng nhất, quyết định khả năng bay của robot. Chúng thường được thiết kế sao cho tái hiện được hình dáng và kích thước của cánh chim tự nhiên.
2.1.2. Hệ thống động cơ
Hệ thống động cơ giúp tạo ra lực đẩy cần thiết để robot có thể bay. Các động cơ này thường được điều khiển bằng các tín hiệu từ hệ thống điều khiển trung tâm, đảm bảo rằng robot có thể thay đổi hướng và tốc độ theo ý muốn.
2.1.3. Cảm biến
Cảm biến là bộ phận giúp robot thu thập thông tin từ môi trường xung quanh. Chúng có thể nhận diện địa hình, gió, nhiệt độ và các yếu tố khác ảnh hưởng đến chuyển động của robot. Nhờ vào cảm biến, robot có thể tự động điều chỉnh hành vi bay để phù hợp với điều kiện môi trường.
2.2. Nguyên lý bay lượn của chim
Để mô phỏng được chuyển động của chim, các nhà nghiên cứu đã phân tích rất kỹ lưỡng các nguyên lý bay lượn của chúng. Từ cách vỗ cánh, thay đổi góc cánh cho đến việc điều chỉnh trung tâm trọng lực, tất cả đều được áp dụng vào thiết kế robot.
2.2.1. Vỗ cánh
Vỗ cánh là hành động quan trọng nhất giúp chim bay. Robot cũng cần phải có cơ chế tương tự để tạo ra lực nâng. Việc điều chỉnh tần suất và góc vỗ cánh sẽ ảnh hưởng trực tiếp đến khả năng bay của robot.
2.2.2. Thay đổi góc cánh
Chim có khả năng thay đổi góc cánh để điều khiển hướng bay. Robot cũng cần được lập trình để có thể thay đổi góc cánh trong quá trình bay nhằm tránh chướng ngại vật hoặc thay đổi hướng di chuyển.
2.2.3. Điều chỉnh trọng lực
Trọng lực là yếu tố quan trọng ảnh hưởng đến khả năng bay của chim. Robot cần phải có hệ thống điều chỉnh trọng lực để có thể bay ổn định và an toàn.
2.3. Công nghệ điều khiển robot
Công nghệ điều khiển đóng vai trò quan trọng trong việc giúp robot hoạt động hiệu quả. Các hệ thống điều khiển tự động hiện đại giúp robot có thể hoạt động độc lập mà không cần sự can thiệp của con người.
2.3.1. Hệ thống điều khiển trung tâm
Hệ thống điều khiển trung tâm là “bộ não” của robot, nơi tiếp nhận thông tin từ các cảm biến và điều khiển các động cơ. Hệ thống này thường được lập trình bằng các thuật toán phức tạp để robot có thể hoạt động một cách tự động.
2.3.2. Giao tiếp không dây
Việc giao tiếp không dây giữa các bộ phận của robot là điều cần thiết để đảm bảo tính linh hoạt trong chuyển động. Công nghệ này cũng cho phép các nhà nghiên cứu kiểm soát robot từ xa.
2.3.3. Học máy và trí tuệ nhân tạo
Ứng dụng của học máy và trí tuệ nhân tạo trong robot mô phỏng chuyển động của chim đang ngày càng trở nên phổ biến. Các hệ thống này giúp robot tự học hỏi từ kinh nghiệm và cải thiện khả năng bay lượn.
3. Ứng dụng thực tiễn của robot mô phỏng chuyển động của chim

3.1. Nghiên cứu sinh thái và bảo vệ môi trường
Robot mô phỏng chuyển động của chim có thể được sử dụng trong nghiên cứu sinh thái để theo dõi các loài chim hoang dã mà không gây rối loạn đến môi trường sống của chúng.
3.1.1. Theo dõi tập tính của chim
Bằng cách sử dụng robot bay, các nhà nghiên cứu có thể theo dõi tập tính bay lượn của chim một cách dễ dàng. Điều này giúp họ hiểu rõ hơn về hành vi, thói quen di cư và môi trường sống của các loài chim.
3.1.2. Phát hiện thay đổi môi trường
Robot có thể được lập trình để phát hiện các thay đổi trong môi trường sống của chim, như ô nhiễm không khí hay thay đổi khí hậu. Những thông tin này rất hữu ích trong việc bảo vệ môi trường và các loài chim.
3.1.3. Giám sát khu bảo tồn
Sử dụng robot bay để giám sát các khu bảo tồn thiên nhiên giúp đảm bảo an toàn cho các loài chim và ngăn chặn các hành vi săn bắn trái phép.
3.2. Công nghệ quân sự
Robot mô phỏng chuyển động của chim cũng có thể được ứng dụng trong lĩnh vực quân sự như một phương tiện do thám.
3.2.1. Do thám bí mật
Robot có khả năng bay lén lút và không gây tiếng động có thể được sử dụng để thu thập thông tin tình báo mà không bị phát hiện.
3.2.2. Tình báo hình ảnh
Những robot này có thể mang theo camera và cảm biến để ghi lại hình ảnh và thông tin, hỗ trợ cho các hoạt động tình báo.
3.2.3. Tăng cường an ninh
Việc sử dụng robot bay trong các nhiệm vụ giám sát an ninh giúp tăng cường khả năng bảo vệ an ninh, đồng thời giảm thiểu rủi ro cho nhân viên.
3.3. Giải trí và nghệ thuật
Ngoài các ứng dụng nghiêm túc, robot mô phỏng chuyển động của chim còn có thể được sử dụng trong giải trí và nghệ thuật.
3.3.1. Trình diễn nghệ thuật
Các nghệ sĩ có thể sử dụng robot bay trong các buổi biểu diễn để tạo ra những màn trình diễn độc đáo, kết hợp giữa công nghệ và nghệ thuật.
3.3.2. Robot chim trong phim ảnh
Robot mô phỏng chuyển động của chim có thể được sử dụng trong ngành công nghiệp điện ảnh để tạo ra các cảnh quay chân thực mà không cần dùng đến động vật thật.
3.3.3. Thú cưng công nghệ
Với sự phát triển của công nghệ, robot mô phỏng chuyển động của chim cũng có thể trở thành thú cưng công nghệ cho những người yêu thích chim mà không cần phải nuôi dưỡng một con chim thật.
4. Thách thức trong việc phát triển robot mô phỏng chuyển động của chim
4.1. Khó khăn trong việc tái tạo chuyển động tự nhiên
Một trong những thách thức lớn nhất trong việc phát triển robot mô phỏng chuyển động của chim là làm sao để tái tạo được chuyển động tự nhiên của chúng.
4.1.1. Độ chính xác trong chuyển động
Chuyển động của chim rất phức tạp và tinh vi, vì vậy việc tái tạo chính xác những hành động này trong robot là rất khó khăn. Các nhà nghiên cứu đang nỗ lực để cải thiện độ chính xác của các robot.
4.1.2. Tính linh hoạt
Chim có khả năng thay đổi chuyển động một cách nhanh chóng và linh hoạt. Điều này đặt ra yêu cầu cao cho robot trong việc điều chỉnh hành vi của mình một cách tự động.
4.1.3. Tương tác với môi trường
Robot cần phải có khả năng tương tác hiệu quả với môi trường xung quanh, từ việc tránh va chạm đến thay đổi hướng bay theo điều kiện thời tiết.
4.2. Chi phí phát triển
Phát triển robot mô phỏng chuyển động của chim đòi hỏi một nguồn tài chính lớn cho nghiên cứu và sản xuất.
4.2.1. Chi phí vật liệu
Việc lựa chọn vật liệu nhẹ nhưng chắc chắn để chế tạo robot không hề đơn giản và có thể tiêu tốn nhiều chi phí.
4.2.2. Chi phí công nghệ
Công nghệ cần thiết để điều khiển và lập trình robot cũng có giá thành khá cao, đặc biệt khi sử dụng các hệ thống điều khiển tự động và cảm biến hiện đại.
4.2.3. Đội ngũ nhân lực
Để phát triển robot hiệu quả, cần có một đội ngũ kỹ sư và nhà nghiên cứu chuyên môn cao, điều này cũng đồng nghĩa với việc chi phí nhân lực sẽ gia tăng.
4.3. Vấn đề đạo đức
Sự phát triển của robot bay cũng đặt ra nhiều vấn đề đạo đức liên quan đến việc sử dụng chúng trong các lĩnh vực khác nhau.
4.3.1. Quyền lợi động vật
Sử dụng robot thay thế cho các loài chim thật có thể gây ra tranh cãi về quyền lợi của động vật. Nhiều ý kiến cho rằng, việc thay thế này có thể dẫn đến sự suy giảm số lượng chim tự nhiên.
4.3.2. An ninh và riêng tư
Robot do thám có thể xâm phạm vào quyền riêng tư cá nhân. Việc sử dụng chúng trong quân sự và tình báo cũng đặt ra câu hỏi về quyền làm người và bảo vệ thông tin cá nhân.
4.3.3. Đạo đức trong nghiên cứu
Các nhà nghiên cứu cũng cần cân nhắc về đạo đức trong việc phát triển và thử nghiệm các robot, đảm bảo rằng các quy trình thử nghiệm không ảnh hưởng xấu đến động vật sống hay môi trường.
5. Xu hướng tương lai của robot mô phỏng chuyển động của chim
5.1. Công nghệ tiên tiến
Với sự phát triển không ngừng của công nghệ, chúng ta đang chứng kiến những xu hướng mới trong lĩnh vực robot mô phỏng chuyển động của chim.
5.1.1. Cải thiện cảm biến
Các cảm biến mới sẽ giúp robot thu thập nhiều thông tin hơn từ môi trường xung quanh, tăng cường khả năng thích ứng và tương tác.
5.1.2. Hệ thống điều khiển AI
Hệ thống điều khiển trí tuệ nhân tạo sẽ trở nên phổ biến hơn, giúp robot tự học hỏi và cải thiện khả năng bay lượn của mình.
5.1.3. Miniaturization
Xu hướng miniaturization sẽ giúp robot trở nên nhỏ gọn hơn nhưng vẫn đảm bảo hiệu suất hoạt động cao.
5.2. Ứng dụng rộng rãi
Robot mô phỏng chuyển động của chim sẽ không chỉ dừng lại ở những ứng dụng hiện tại mà còn mở ra nhiều cơ hội mới trong tương lai.
5.2.1. Du lịch và khám phá
Robot có thể được sử dụng trong các chuyến du lịch để khám phá những vùng đất mới mà con người không thể tiếp cận.
5.2.2. Khoa học vũ trụ
Robot mô phỏng chuyển động của chim có thể được trang bị để khám phá không gian vũ trụ, cung cấp thông tin quý giá về các hành tinh khác.
5.2.3. Giáo dục
Robot có thể được sử dụng trong giáo dục để giúp học sinh hiểu biết hơn về sinh học và công nghệ.
5.3. Tích hợp với các công nghệ khác
Robot mô phỏng chuyển động của chim sẽ ngày càng được tích hợp với các công nghệ khác.
5.3.1. Internet of Things (IoT)
Tích hợp với IoT sẽ giúp robot có thể giao tiếp với các thiết bị khác, tạo ra một hệ sinh thái thông minh hơn.
5.3.2. Blockchain
Công nghệ blockchain có thể được ứng dụng để theo dõi nguồn gốc và thông tin của robot, đảm bảo tính minh bạch và bảo mật.
5.3.3. Công nghệ sinh học
Sự kết hợp giữa công nghệ robot và sinh học sẽ mở ra những khả năng mới trong việc tái tạo và bảo vệ động vật hoang dã.
Kết luận
Robot mô phỏng chuyển động của chim là một lĩnh vực đầy tiềm năng, không chỉ giúp chúng ta hiểu rõ hơn về thế giới tự nhiên mà còn mang lại nhiều ứng dụng trong đời sống hàng ngày. Dù còn nhiều thách thức trong việc phát triển và hoàn thiện những robot này, nhưng với sự tiến bộ của công nghệ, chúng ta có thể kỳ vọng vào những bước tiến vượt bậc trong tương lai. Việc nghiên cứu và phát triển các robot này không chỉ phục vụ cho mục đích khoa học mà còn góp phần bảo vệ môi trường và động vật hoang dã. Hy vọng rằng, trong tương lai gần, chúng ta sẽ thấy nhiều ứng dụng thú vị và hữu ích từ những robot mô phỏng chuyển động của chim.

